BIOGRAPHY
NEWS
WORKS
BLOG
What is "發明 (invention)" ?
CUREST ACADEMY
NOTE
Contact
Inventor Ricky
The Da Vinci of the 21st century.
BIOGRAPHY
NEWS
WORKS
BLOG
What is "發明 (invention)" ?
CUREST ACADEMY
NOTE
Contact
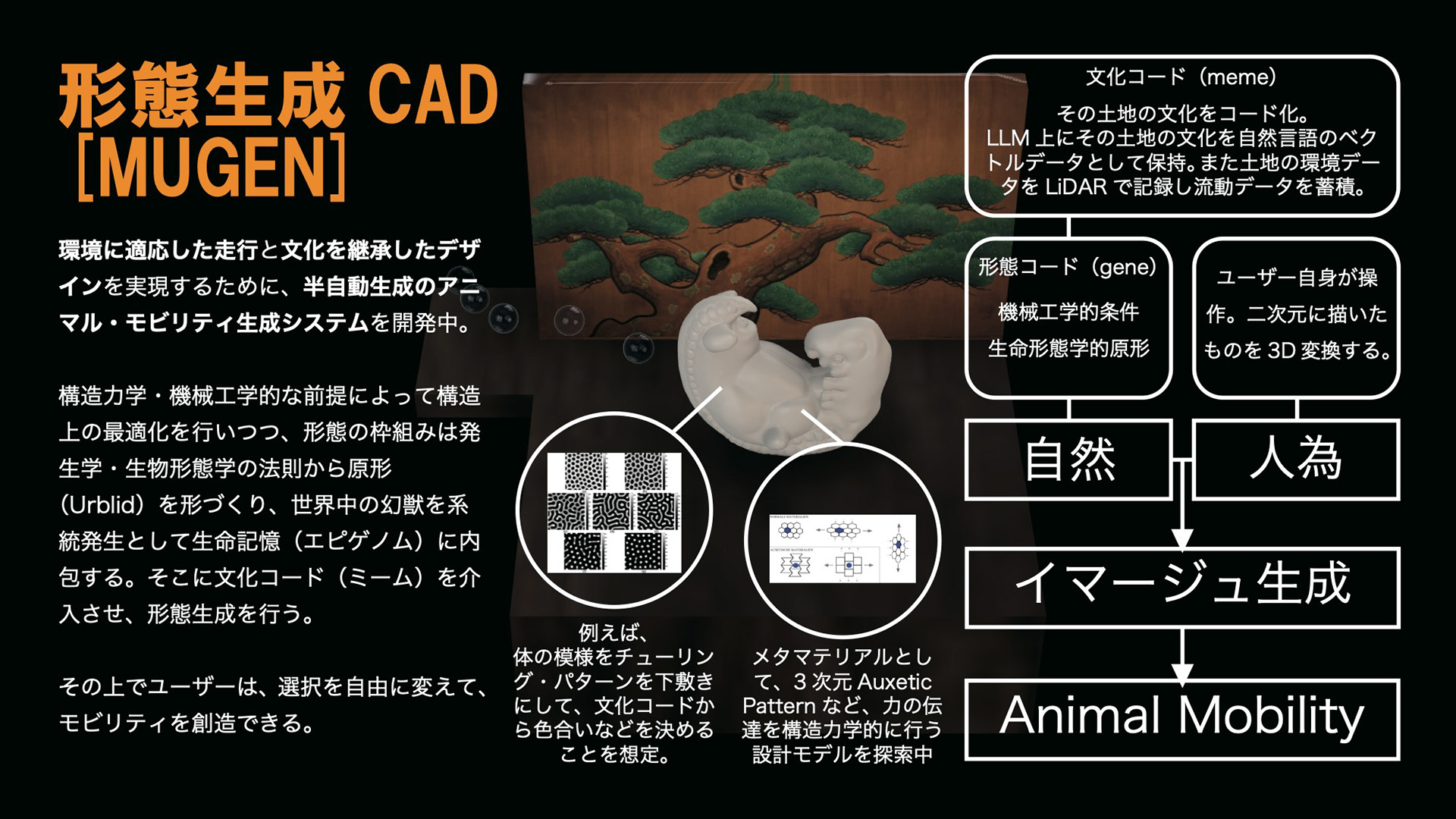
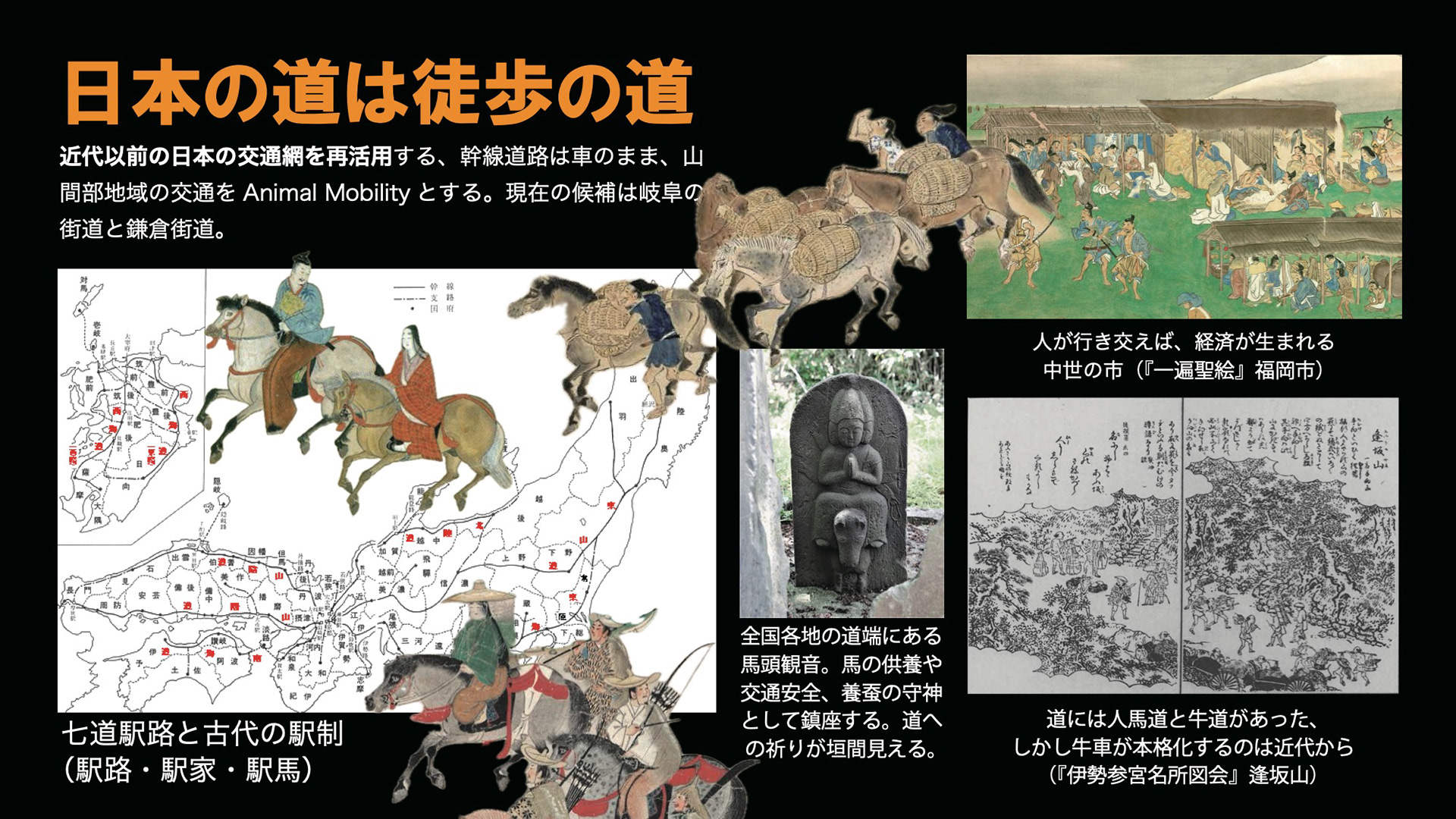
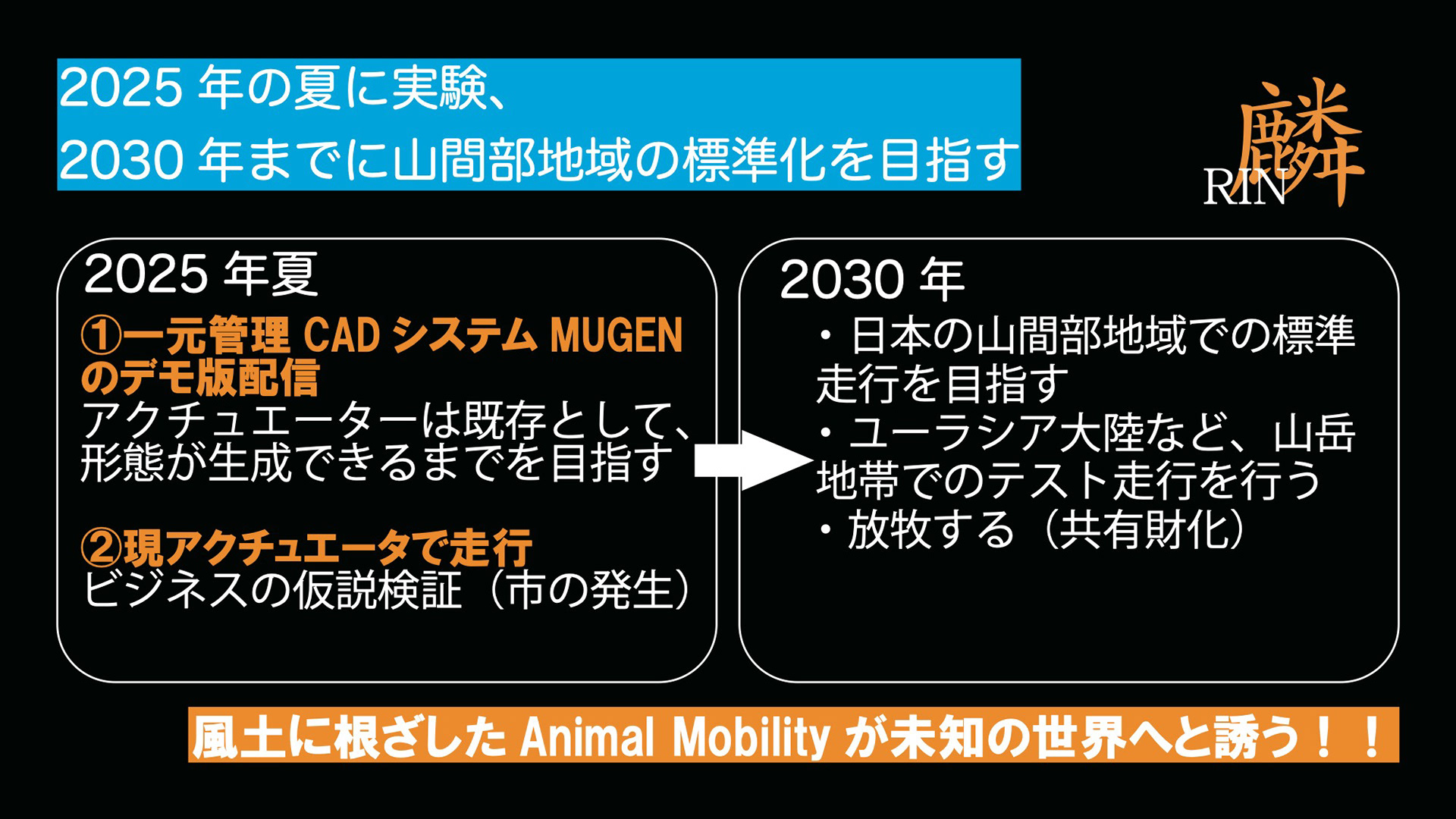
Project "麟 RIN" (2025)
不整地走行に特化した動物型モビリティ(アニモビリティ)RIN
風土に根ざした四脚ロボットを実現し、その場所の経済・文化・自然のエコロジーを循環させる。
↑
Back to Top